A compact and compliant electrorheological actuator for generating a wide range of haptic sensations
Abstract
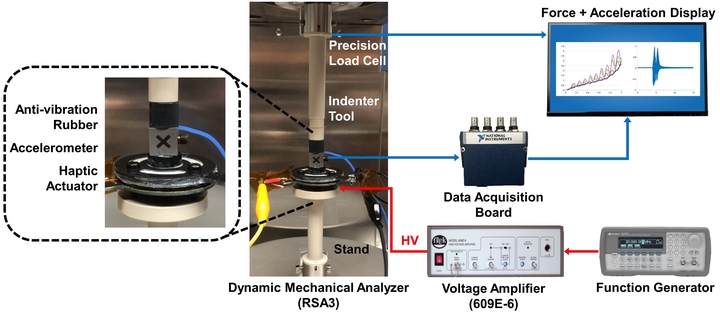
Robust haptic devices that can convey the entire spectrum of human touch perception are necessary to afford realistic haptic experiences. For vivid and immersive interaction, a combination of both tactile and kinesthetic information must be presented to users. While vibrotactile feedback has become ubiquitous in today’s handheld devices, traditional kinesthetic actuators present significant challenges to miniaturization. Moreover, only limited success has been achieved in developing haptic actuators capable of conveying both tactile and kinesthetic sensations for small consumer electronics. Therefore, this study presents a compact actuator based on electrorheological (ER) fluid for generating a wide range of concurrent kinesthetic and tactile feedback. The design focus for the proposed actuator is to activate multiple operating modes of ER fluid to maximize the force generated by the actuator within a given small size constraint. To this end, the design incorporated two ground electrodes (a stationary ring electrode and a movable electrode attached to a spring element) for tuning the fluid’s yield stress in both flow and squeeze modes. After fabricating a prototype actuator, testing was performed with a dynamic mechanical analyzer (DMA) and an accelerometer to evaluate its ability to produce a wide range of kinesthetic feedback, as well as distinct vibrotactile feedback up to the limit of human perception. The results of kinesthetic testing indicate that the actuator can generate large forces (6.2 N maximum at 4 kV) at rates greater than the just-noticeable difference, indicating that the actuator can convey a wide range of kinesthetic sensations. Tactile evaluation using DMA and the processed acceleration response demonstrated that the actuator can generate both low and high frequency (up to 300 Hz) vibrotactile sensations at perceivably high intensity.